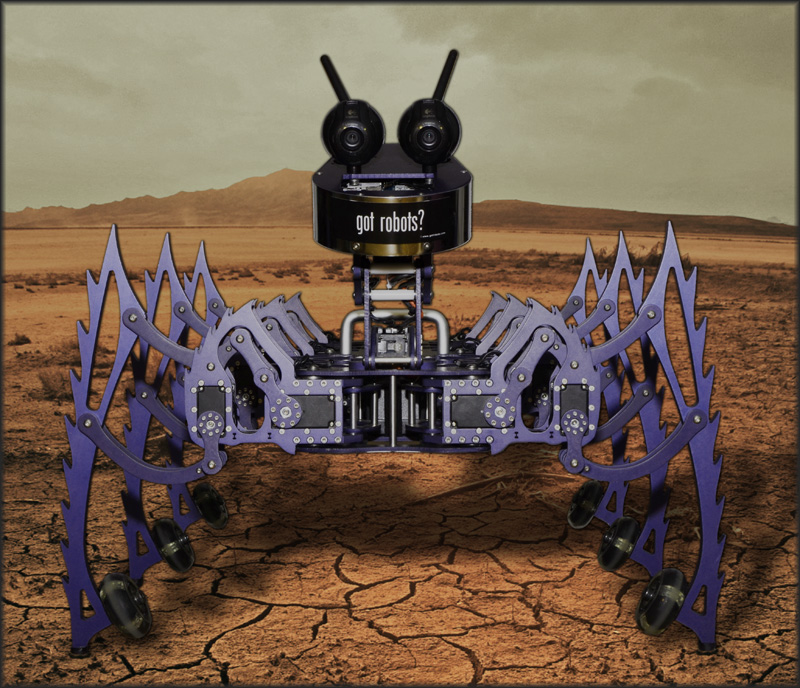
Glider represents the next evolution in my design for a hexapod robot, building on the locking
linkage design that was so successful on
Ziggy. The motors that hold the
robot up (the inner motors seen in the photo) are connected to the legs by two linkages that are
driven inline when the leg meets the ground. In this way, no force is transmitted back to the
motor when the leg is down and the robot can stand without needing to energize the motors. This
makes for a very energy efficient robot and has the added advantage that walking is still possible
when a motor is not working.
I had been thinking for several years about building a new robot with the added third degree of
freedom (DOF) on each leg that would allow the foot to move to any arbitrary position within its
3D envelope. When Ziggy lost the Walker Challenge, a competition that the robot had dominated
for 8 years, at RoboGames 2012 I decided it was time to build that robot and retake my medal.
After an intense year of design, redesign, fabrication, assembly and programming I had Glider
ready for RoboGames 2013, held on 4/19/13 - 4/21/13 in San Mateo, California. In the Walker
Challenge he easily beat out the competition with a time of 7.75s to complete the course - see
the video of him winning here. The Silver medal time was 14.82s so he
was nearly twice as fast, clocking in a speed of almost 0.4 m/s.
Glider also won the Silver Medal in Best of Show, losing by a mere 2 points to my friend
Nicolas Saugnier and his great robot
Xachikoma.
What makes Glider unusual is that, when his legs are spread wide, the passive inline skate wheels
engage and with a swimming motion the robot can skate at a reasonable speed on any flat surface.
By modifying the motion steering can be achieved, so Glider can negotiate obstacles while skating
at speed. He can skate over 10x as fast as he can walk.
After RoboGames was finished I implemented an Inverse Kinematics (IK) system which allows all motion
to be generated using ellipses and other smooth curves to define the path of each foot or wheel, enabling
the robot to move much more organically. The robot is now complete, with speakers allowing the robot to
talk and a touchscreen providing an animated mouth and other functions. The cameras are also now operational.